
a two-part exploration of balance and movement in robots of nature. the first, titled Zen, examines the naturalness—or unnaturalness—of human intervention in the Wilderness. the second part, Urban Rockfitters, extends the robot into sensing and autonomous reactions. both robots were built with found objects.
Created in MS 179: Robotics, Digital Media, and Environment at Harvey Mudd College

Zen
Why do people stack rocks? For public art, for mediation, for religion? There’s something alluring about the balance and harmony amongst the rocks—ensconced in nature, yet distinctly human. The concept of “balance of nature” extends back to ancient Greece. Claiming that ecological systems are in constant equilibrium, it assumes that nature will balance itself out to regulate life. Although modern science has determined that nature is chaotic and perpetually unbalanced, this concept continues to be widely popular in the public.
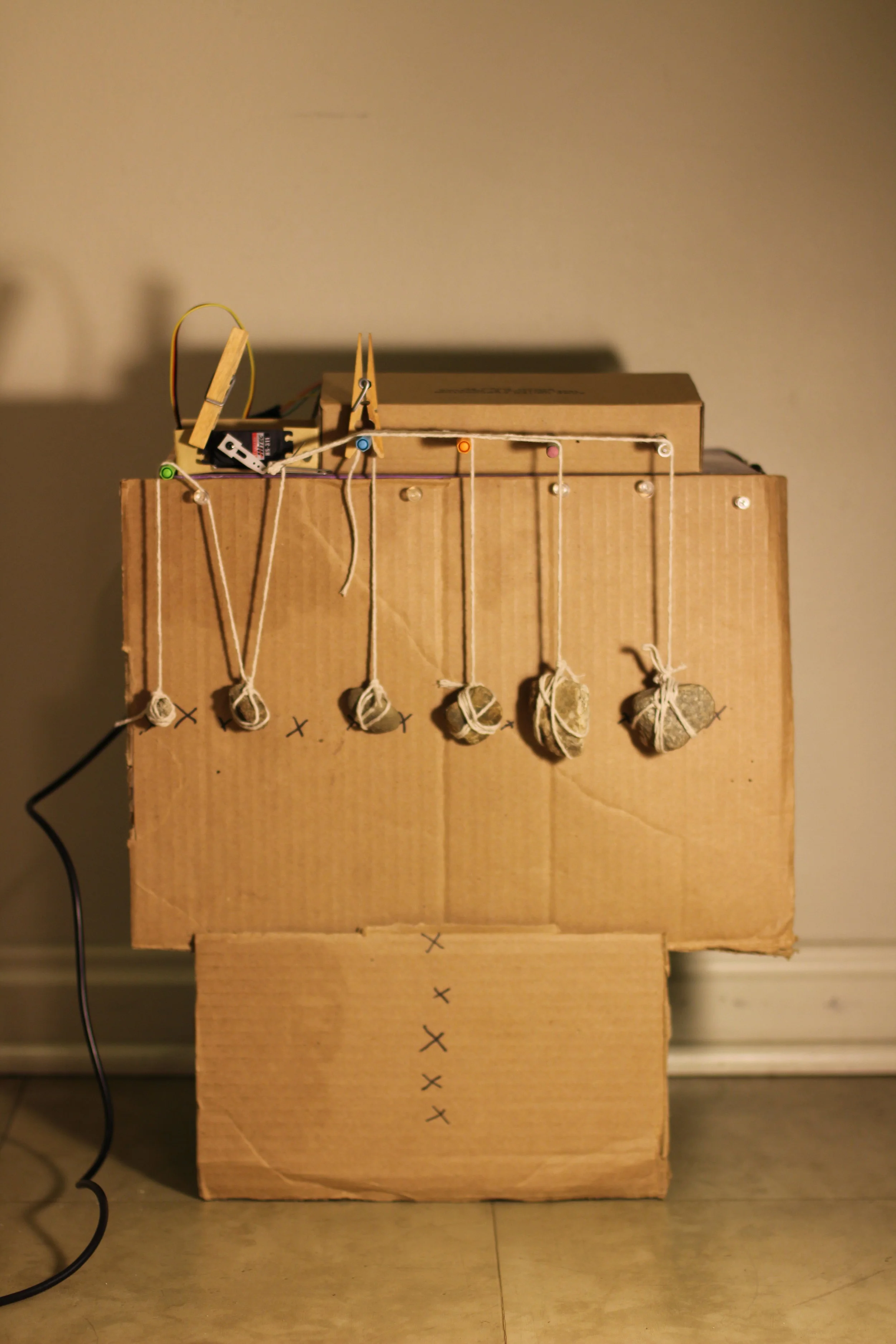
Zen consists of six hanging rocks that increase in size from left to right. Each rock is connected by string to other rocks in the system or hangs in static. As the servo motor shifts within its 180 degree range, the movement causes the rocks to push and pull on each other to varying heights in Wilderness. The servo motor moves in response to human movements via mouse control. However, there exists a motor angle where the rocks are perfectly aligned on the same horizontal axis—this is the Built Environment. It is aesthetically pleasing on the eye, yet the balance is unnatural. The juxtaposition of the mechanical balance in Wilderness with the visual balance in the Built Environment raises questions on the role of human interventionism and participation in natural systems.
